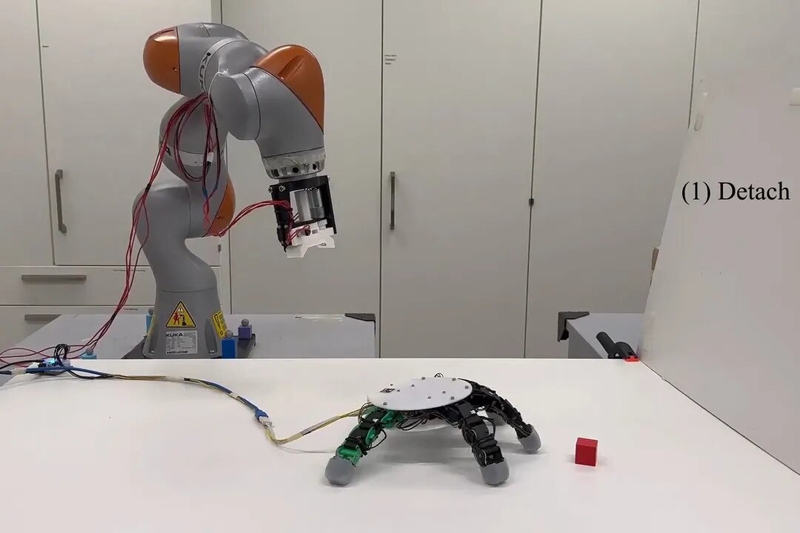
Разработчики Федеральной политехнической школы Лозанны (EPFL, Швейцария) представили на Международной конференции по робототехнике и автоматизации (ICRA) шарнирную роботизированную руку, способную расширить радиус действия, отсоединяясь и самостоятельно перемещаясь к предмету, чтобы его взять.

Роботизированные руки обычно прикреплены к основанию на полу или другим конструкциям для дополнительной устойчивости, что ограничивает радиус их действия. Целью исследования, проведённого в Лаборатории алгоритмов и систем обучения EPFL (LASA), была разработка бимодальной роботизированной руки с расширенными возможностями захвата, включая периодическую независимость от руки, к которой она прикреплена.
Роборуки обычно создаются с одной целью: удерживать и перемещать предметы. Чтобы разработать роботизированную руку, которая могла бы делать это, перемещаясь самостоятельно, исследователи сгенерировали и усовершенствовали базовую конструкцию с помощью генетического алгоритма, который опирается на биологические приёмы, и физического симулятора MuJoCo для проверки дееспособности прототипа.
Исследователи определили оптимальное положение и количество необходимых сочленённых пальцев — их оказалось пять, как у человека. Пальцы руки могут сгибаться в двух направлениях, что позволяет ей не только «ползать», но и захватывать два предмета одновременно, будучи прикреплённой к конечности роботизированного манипулятора. Она также может использовать несколько пальцев для подъёма предметов, в то время как остальные функционируют в качестве опоры.
Роботизированная рука также имеет магнитный крепление на «запястье». Если добавить такую шарнирную роботизированную руку, например, к роботу Spot, то его можно будет использовать для исследования или анализа областей, которые сейчас недоступны из-за габаритов и ограниченной манёвренности.